
- バス
- 公開日: 最終更新日:
“乗務員ロボット”を導入して既存車両で自動運転?このアイデアの限界とその理由を徹底解説!
株式会社MR.Nexus(エムアールネクサス)
自動運転の導入が社会的な関心を集める中で、「ロボットにハンドルやブレーキ操作を任せれば、既存の車両でも自動運転ができるのでは?」という素朴な発想に触れることがあります。こうした“乗務員ロボット”という発想は、見た目のわかりやすさや既存資産の活用という面で一定の魅力を持ちますが、実際には技術・制度・運用の各面において複数の課題を抱えており、現実的な選択肢とは言い難いのが実情です。本記事では、なぜこの発想が生まれ、どこに限界があるのかを多角的に検証し、公共交通における本質的な技術導入のあり方を探ります。
「乗務員ロボット」という発想の背景
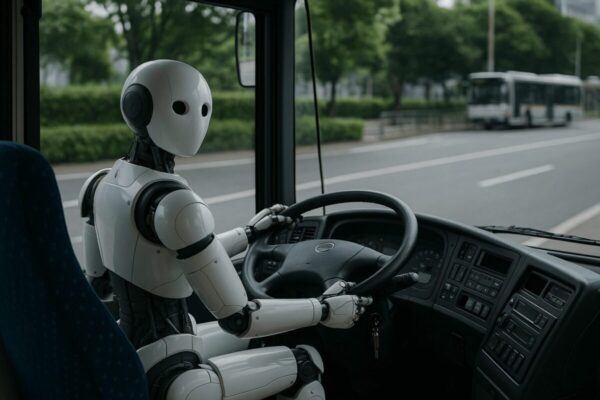
自動運転技術への社会的関心が高まる中で、「乗務員ロボットを使えば既存車両でも自動運転が実現できるのでは?」という発想に出会うことがあります。ロボットが人間の代わりに運転席に座り、ハンドルやブレーキ、各種スイッチ類を操作する──その姿は直感的に分かりやすく、既存の設備資産を最大限活用できるという点で、一見すると極めて合理的に思えます。
特に、地方のバスや鉄道事業者においては、新型車両の調達や専用自動運転インフラの整備が困難な場合が多く、「今ある車両を延命しつつ、無人運転に近づける手段がないか」という問いに常に直面しています。こうした現場感覚においては、「機械が人間の代わりに運転する」という形は魅力的に映るのも無理はありません。また、行政や自治体など車両運用の詳細に直接関与しないレイヤーでは、「ロボットに置き換える」という単純化された構図が政策的にも受け入れられやすい傾向があります。
このような背景の中で、ロボティクス技術の進化は拍車をかけています。アクチュエーターによる精緻な手足の動作制御、視覚認識を可能にするビジョンセンサー、深層学習を活用した動作最適化など、現在の産業用ロボットは「人間の模倣」として相当の性能を持つようになりました。事実、製造業や物流業界では、機械による作業の代替はすでに広範に実用化されており、一定の成功を収めています。
こうした状況を踏まえ、「人間の操作をロボットで再現することができれば、自動運転に近い運用が実現できるのではないか?」というアイデアが浮かぶのは、ごく自然な流れです。そして、それが社会的課題である人手不足や高齢化の文脈と結びつくことで、乗務員ロボットという構想は一種の“解決策”として期待を集める側面もあります。
しかし、この発想には見落とされがちな前提条件がいくつもあります。それは「そもそも公共交通車両というものが、極めて“人間の操作”に最適化された設計になっている」こと、そして「制度や法令もまた“人間の存在”を前提に構築されている」という事実です。つまり、人間が触れる前提で設計された操作系に、物理的にロボットをあてがうだけで、果たして同等の安全性・柔軟性・保守性を確保できるのかという、極めて根本的な問いが立ちはだかります。
また、「模倣可能性=実用性」ではないという点も見落としてはなりません。技術的には可能であっても、コストや故障率、保守の難易度、事故時の責任構造といった実務的な観点から見ると、むしろ「技術的に成り立っていても、現実的ではない」ケースは多く存在します。乗務員ロボットはまさにその代表格であり、構想段階では魅力的でも、実装段階で様々な課題に直面することになるのです。

会社名株式会社MR.Nexus(エムアールネクサス)
住所〒103-0022 東京都中央区日本橋室町1丁目11番12号 日本橋水野ビル7階
キャッチコピー公共交通に変革を、技術革新で次世代の安全と効率を
事業内容Mobility Nexus は、鉄道・航空をはじめとする公共交通業界における製品・技術・メーカー情報を整理・集約し、事業者とサプライヤをつなぐ情報プラットフォームです。技術の導入事例や製品比較を体系化し、事業者が現場視点で最適な選択を行える環境を構築しています。
本サイトは、公共交通業界での実務経験を持つエンジニアが監修しており、現場感覚と専門性を重視した中立的な構成を心がけています。
現在、製品情報の整理にご協力いただけるサプライヤ様からの情報提供を募集しています。特長や導入実績、保守体制などを詳細に記載します。製品個別単位での掲載、比較記事への参画など、目的に応じて柔軟に対応可能です。公共交通の技術導入を後押しする情報基盤づくりにぜひご協力ください。
関連記事




掲載に関する
お問い合わせ
お気軽にお問い合わせください
